详情
摘要
本实用新型公开了一种悬挂式双机械臂协作洗车机器人结构,涉及洗车设备技术领域,包括竖直设置的机架上横向设有横臂,横臂底部分别连接有可自由转动的第一机械臂和第二机械臂;第一机械臂和第二机械臂均包括横臂底部连接有可转动方向的底座支撑件第一端,底座支撑件第二端连接有可自转的第一调节臂第一端,底座支撑件通过T型连接件调节第一调节臂转动,第一调节臂第二端连接有可自转的第二调节臂第一端,第一调节臂第二端通过关节件调节第二调节臂转动,第二调节臂第二端连接有可转动方向的操作装置。本实用新型采用两个悬挂式机器人同时洗车,大大加快了洗车时间。
权利要求
1.一种悬挂式双机械臂协作洗车机器人结构,其特征在于,包括机架(1)、第一机械臂(2)、第二机械臂(3)和横臂(4);竖直设置的机架(1)上横向设有横臂(4),所述横臂(4)底部分别连接有可自由转动的第一机械臂(2)和第二机械臂(3);所述第一机械臂(2)和第二机械臂(3)均包括底座支撑件(21)、第一调节臂(22)、关节件(23)、第二调节臂(24)、操作装置(25)和T型连接件(26);所述横臂(4)底部连接有可转动方向的底座支撑件(21)第一端,所述底座支撑件(21)第二端连接有可自转的第一调节臂(22)第一端,所述底座支撑件(21)通过T型连接件(26)调节第一调节臂(22)转动,所述第一调节臂(22)第二端连接有可自转的第二调节臂(24)第一端,所述第一调节臂(22)第二端通过关节件(23)调节第二调节臂(24)转动,所述第二调节臂(24)第二端连接有可转动方向的操作装置(25)。
2.根据权利要求1所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述横臂(4)底部设有镂空的凸起(41),所述底座支撑件(21)包括第一伺服电机(211)、第一减速器(212)、第一座板(213);所述凸起(41)内镶嵌有第一伺服电机(211),所述第一伺服电机(211)输出轴通过第一减速器(212)与T型连接件(26)的竖臂连接,所述第一减速器(212)外套设有第一座板(213),所述第一座板(213)与凸起(41)前端外壁连接。
3.根据权利要求2所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述T型连接件(26)竖臂外设有轴承箱(261),所述轴承箱(261)与T型连接件(26)竖臂之间设有两个第一滚动轴承(262),第一滚动轴承(262)套设在T型连接件(26)竖臂两端,所述轴承箱(261)与第一座板(213)连接,所述T型连接件(26)的横臂内镶嵌有第二伺服电机(263),所述第二伺服电机(263)的输出轴通过第二减速器(264)与第一调节臂(22)连接。
4.根据权利要求3所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述第一调节臂(22)包括第三伺服电机(221)、L型接头(222)和第一臂杆(223);所述第二伺服电机(263)的输出轴通过第二减速器(264)与L型接头(222)横臂连接,所述L型接头(222)竖臂连接有第一臂杆(223),所述L型接头(222)竖臂内镶嵌有第三伺服电机(221),所述第三伺服电机(221)输出轴通过第三减速器(224)与第一臂杆(223)连接,所述第一臂杆(223)另一端通过关节件(23)连接第二调节臂(24)。
5.根据权利要求4所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述关节件(23)包括关节套筒(231)、第四伺服电机(232)、第二座板(233);所述第一臂杆(223)与关节套筒(231)连接,所述关节套筒(231)侧壁上连接有第二座板(233),所述第二座板(233)上连接有第四伺服电机(232),所述第四伺服电机(232)的输出轴通过第四减速器与第二调节臂(24)连接。
6.根据权利要求5所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述第二调节臂(24)包括T型套筒(241)、第五伺服电机(242)、第三座板(243)、第二臂杆(244);所述第四伺服电机(232)的输出轴通过第四减速器与T型套筒(241)竖臂连接,所述T型套筒(241)横臂内套接有第二臂杆(244),所述T型套筒(241)横臂与第二臂杆(244)之间设有第二滚动轴承(245),所述第二滚动轴承(245)设置在T型套筒(241)横臂两端内,所述T型套筒(241)横臂第一端外连接有第三座板(243),所述第三座板(243)上连接有第五伺服电机(242),所述第五伺服电机(242)输出轴通过第五减速器与第二臂杆(244)一端连接,所述第二臂杆(244)另一端贯穿T型套筒(241)横臂与操作装置(25)连接。
7.根据权利要求6所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述操作装置(25)包括固定框(251)、第六伺服电机(252)、第七伺服电机(253)、第一锥齿轮(254)、第二锥齿轮(255)、腕部箱体(256)和工作件(257);所述第二臂杆(244)另一端连接有固定框(251),所述固定框(251)内分别设有横向的第六伺服电机(252)、第七伺服电机(253)和竖向的腕部箱体(256),所述第六伺服电机(252)和第七伺服电机(253)输出轴方向相反设置,所述腕部箱体(256)内设有第一锥齿轮(254)和第二锥齿轮(255),所述第一锥齿轮(254)和第二锥齿轮(255)啮合连接,所述第一锥齿轮(254)通过第一齿轮轴(2541)转动连接的设置在腕部箱体(256)内,所述第一齿轮轴(2541)第一端与第一锥齿轮(254)连接,所述第一齿轮轴(2541)第二端分别贯穿腕部箱体(256)第一侧壁和固定框(251)第一侧壁连接有第一带轮(2531),所述第二锥齿轮(255)通过第二齿轮轴(2551)转动连接的设置在腕部箱体(256)内,所述第二齿轮轴(2551)另一端贯穿腕部箱体(256)底壁可拆卸连接有工作件(257);所述腕部箱体(256)第二侧壁外连接有转动轴(2561),所述转动轴(2561)贯穿固定框(251)第二侧壁连接第二带轮(2521),所述第七伺服电机(253)输出轴贯穿固定框(251)第一侧壁连接有第三带轮(2532),所述第六伺服电机(252)输出轴贯穿固定框(251)第二侧壁连接有第四带轮(2522),所述第三带轮(2532)和第一带轮(2531)、第二带轮(2521)和第四带轮(2522)外均套设有相配合的皮带。
8.根据权利要求7所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,第一齿轮轴(2541)分别与腕部箱体(256)第一侧壁和固定框(251)第一侧壁之间、第二齿轮轴(2551)与腕部箱体(256)底壁之间、转动轴(2561)与固定框(251)第二侧壁之间分别设有第三滚动轴承。
9.根据权利要求1所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述机架(1)底部设有弯曲梁(42),所述弯曲梁(42)底部也可安装有万向轮,所述机架(1)顶部与横臂(4)之间倾斜设有加固梁(5)。
10.根据权利要求7所述的悬挂式双机械臂协作洗车机器人结构,其特征在于,所述工作件(257)为喷嘴或毛刷或热吹风。
说明书
一种悬挂式双机械臂协作洗车机器人结构
技术领域
[0001]本实用新型涉及洗车设备技术领域,具体涉及一种悬挂式双机械臂协作洗车机器人结构。
背景技术
[0002]目前,随着经济的日益发展,现在汽车已经进入到每家每户,即使不是节假日道路交通拥堵也时有发生,更不用说像4S店、修理店等进行汽车维护保养的场所。而洗车对于车主们也是一个麻烦的事情。自己洗,费时费力,去专业的清洗店里洗,时常得排队,价格还高。这样,洗车成为了大家不愿面对的事情。目前存在一些新颖的洗车方式,比如各种洗车机,隧道式洗车机、龙门往复式洗车机、无接触式洗车机等等,这些机器无不结构复杂,占用空间大,不利于搬运挪移,他们的洗车方式也就是机器内侧布满刷子进行汽车的来回刷洗。此外,虽然有一些小巧的自助洗车的方式,但是需要人工拿起喷水枪进行洗车。
发明内容
[0003]本实用新型针对上述问题,提供一种悬挂式双机械臂协作洗车机器人结构,解决了现有的装置清理车不便的问题。
[0004]本实用新型采用的技术方案为:一种悬挂式双机械臂协作洗车机器人结构,包括机架、第一机械臂、第二机械臂和横臂;竖直设置的机架上横向设有横臂,所述横臂底部分别连接有可自由转动的第一机械臂和第二机械臂;
[0005]所述第一机械臂和第二机械臂均包括底座支撑件、第一调节臂、关节件、第二调节臂、操作装置和T型连接件;
[0006]所述横臂底部连接有可转动方向的底座支撑件第一端,所述底座支撑件第二端连接有可自转的第一调节臂第一端,所述底座支撑件通过T型连接件调节第一调节臂转动,所述第一调节臂第二端连接有可自转的第二调节臂第一端,所述第一调节臂第二端通过关节件调节第二调节臂转动,所述第二调节臂第二端连接有可转动方向的操作装置。
[0007]进一步地,所述横臂底部设有镂空的凸起,所述底座支撑件包括第一伺服电机、第一减速器、第一座板;所述凸起内镶嵌有第一伺服电机,所述第一伺服电机输出轴通过第一减速器与T型连接件的竖臂连接,所述第一减速器外套设有第一座板,所述第一座板与凸起前端外壁连接。
[0008]更进一步地,所述T型连接件竖臂外设有轴承箱,所述轴承箱与T型连接件竖臂之间设有两个第一滚动轴承,第一滚动轴承套设在T型连接件竖臂两端,所述轴承箱与第一座板连接,所述T型连接件的横臂内镶嵌有第二伺服电机,所述第二伺服电机的输出轴通过第二减速器与第一调节臂连接。
[0009]更进一步地,所述第一调节臂包括第三伺服电机、L型接头第一臂杆;所述第二伺服电机的输出轴通过第二减速器与L型接头横臂连接,所述L型接头竖臂连接有第一臂杆,所述L型接头竖臂内镶嵌有第三伺服电机,所述第三伺服电机输出轴通过第三减速器与第一臂杆连接,所述第一臂杆另一端通过关节件连接第二调节臂。
[0010]更进一步地,所述关节件包括关节套筒、第四伺服电机、第二座板;所述第一臂杆与关节套筒连接,所述关节套筒侧壁上连接有第二座板,所述第二座板上连接有第四伺服电机,所述第四伺服电机的输出轴通过第四减速器与第二调节臂连接。
[0011]更进一步地,所述第二调节臂包括T型套筒、第五伺服电机、第三座板、第二臂杆;所述第四伺服电机的输出轴通过第四减速器与T型套筒竖臂连接,所述T型套筒横臂内套接有第二臂杆,所述T型套筒横臂与第二臂杆之间设有第二滚动轴承,所述第二滚动轴承设置在T型套筒横臂两端内,所述T型套筒横臂第一端外连接有第三座板,所述第三座板上连接有第五伺服电机,所述第五伺服电机输出轴通过第五减速器与第二臂杆一端连接,所述第二臂杆另一端贯穿T型套筒横臂与操作装置连接。
[0012]更进一步地,所述操作装置包括固定框、第六伺服电机、第七伺服电机、第一锥齿轮、第二锥齿轮、腕部箱体和工作件;所述第二臂杆另一端连接有固定框,所述固定框内分别设有横向的第六伺服电机、第七伺服电机和竖向的腕部箱体,所述第六伺服电机和第七伺服电机输出轴方向相反设置,所述腕部箱体内设有第一锥齿轮和第二锥齿轮,所述第一锥齿轮和第二锥齿轮啮合连接,所述第一锥齿轮通过第一齿轮轴转动连接的设置在腕部箱体内,所述第一齿轮轴第一端与第一锥齿轮连接,所述第一齿轮轴第二端分别贯穿腕部箱体第一侧壁和固定框第一侧壁连接有第一带轮,所述第二锥齿轮通过第二齿轮轴转动连接的设置在腕部箱体内,所述第二齿轮轴另一端贯穿腕部箱体底壁可拆卸连接有工作件;所述腕部箱体第二侧壁外连接有转动轴,所述转动轴贯穿固定框第二侧壁连接第二带轮,所述第七伺服电机输出轴贯穿固定框第一侧壁连接有第三带轮,所述第六伺服电机输出轴贯穿固定框第二侧壁连接有第四带轮,所述第三带轮和第一带轮、第二带轮和第四带轮外均套设有相配合的皮带。
[0013]更进一步地,第一齿轮轴分别与腕部箱体第一侧壁和固定框第一侧壁之间、第二齿轮轴与腕部箱体底壁之间、转动轴与固定框第二侧壁之间分别设有第三滚动轴承。
[0014]更进一步地,所述机架底部设有弯曲梁,所述弯曲梁底部也可安装有万向轮,所述机架顶部与横臂之间倾斜设有加固梁。
[0015]更进一步地,所述工作件为喷嘴或毛刷或热吹风。
[0016]本实用新型的优点:
[0017]本实用新型提供了一种悬挂式双机械臂协作洗车机器人结构,由于采用两个悬挂式机器人同时洗车,大大加快了洗车时间;两个悬挂式机器人对称安装在横臂上,节约了安装空间;悬挂式的机械臂洗车机器人方便对车顶及车身进行更好更全面的清洗;洗车机器人清洗时,水枪的水流自上而下喷出,不会造成二次弄脏;
[0018]本实用新型通过其灵活的自由度可以覆盖汽车的全身进行清洗,七次调节即七自由度机器人末端能够在汽车工作空间可以不受约束的覆盖全部车身,同时安装基面足够大,从而保证机器人在工作时的稳定性,作业范围大、动作灵活、能够进行较远处作业也可以进行较近处作业,也可以根据车辆形状进行尺寸的修改,适应各种车型。
[0019]除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
[0020]构成本申请的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
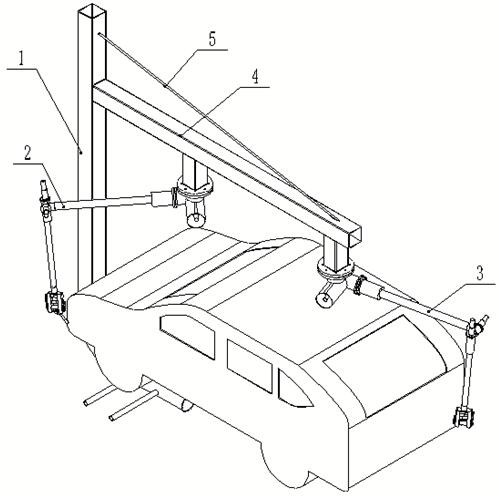
[0021]图1是本实用新型的整体结构示意图;
[0022]图2是本实用新型的机架结构示意图;
[0023]图3是本实用新型的第一机械臂结构示意图;
[0024]图4是本实用新型的底座支撑件结构示意图;
[0025]图5是本实用新型的T型连接件结构示意图;
[0026]图6是本实用新型的第一调节臂结构示意图;
[0027]图7是本实用新型的第二调节臂结构示意图;
[0028]图8是本实用新型的T型套筒结构示意图;
[0029]图9是本实用新型的关节套筒结构示意图;
[0030]图10是本实用新型的操作装置结构示意图;
[0031]图11是本实用新型的第一锥齿轮安装示意图。
[0032]附图标记:
[0033]1‑机架、2‑第一机械臂、3‑第二机械臂、4‑横臂、5‑加固梁;
[0034]21‑底座支撑件、22‑第一调节臂、23‑关节件、24‑第二调节臂、25‑操作装置、26‑T型连接件;
[0035]41‑凸起、42‑弯曲梁;
[0036]211‑第一伺服电机、212‑第一减速器、213‑第一座板;
[0037]221‑第三伺服电机、222‑L型接头、223‑第一臂杆、224‑第三减速器;
[0038]231‑关节套筒、232‑第四伺服电机、233‑第二座板;
[0039]241‑T型套筒、242‑第五伺服电机、243‑第三座板、244‑第二臂杆、245‑第二滚动轴承;
[0040]251‑固定框、252‑第六伺服电机、253‑第七伺服电机、254‑第一锥齿轮、255‑第二锥齿轮、256‑腕部箱体、257‑工作件;
[0041]261‑轴承箱、262‑第一滚动轴承、263‑第二伺服电机、264‑第二减速器;
[0042]2521‑第二带轮、2522‑第四带轮、2531‑第一带轮、2532‑第三带轮、2541‑第一齿轮轴、2551‑第二齿轮轴、2561‑转动轴。
具体实施方式
[0043]为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
[0044]在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0045]参考图1至图11,一种悬挂式双机械臂协作洗车机器人结构,包括机架1、第一机械臂2、第二机械臂3和横臂4;竖直设置的机架1上横向固定连接有横臂4,机架1底部固定连接有弯曲梁42,弯曲梁42底部也可安装有万向轮,机架1顶部与横臂4之间固定连接有倾斜的加固梁5,机架1、横臂4和加固梁5三者之间构成一个三角形,形成稳定支撑结构;
[0046]横臂4底部分别连接有可自由转动的第一机械臂2和第二机械臂3,方便第一机械臂2和第二机械臂3可按照需要的位置移动;
[0047]第一机械臂2和第二机械臂3均包括底座支撑件21、第一调节臂22、关节件23、第二调节臂24、操作装置25和T型连接件26;
[0048]横臂4底部连接有可转动方向的底座支撑件21第一端,用作第一次调节,底座支撑件21第二端连接有可自转的第一调节臂22第一端,可自转的第一调节臂22为可绕其自身轴线转动,形成类似自转的运动,底座支撑件21通过T型连接件26调节第一调节臂22转动,用作第二次调节,可自转的第一调节臂22,用作第三次调节,第一调节臂22第二端连接有可自转的第二调节臂24第一端,可自转的第二调节臂24为可绕其自身轴线转动,形成类似自转的运动,第一调节臂22第二端通过关节件23调节第二调节臂24转动,用作第四次调节,关节件23也使得第一调节臂22与第二调节臂24运动互不影响,可自转的第二调节臂24用作第五次调节,第二调节臂24第二端连接有可转动方向的操作装置25,做出最终的调整,完成工作。
[0049]横臂4底部固定连接有镂空的凸起41,底座支撑件21包括第一伺服电机211、第一减速器212、第一座板213;凸起41内固定镶嵌有第一伺服电机211,节约空间,第一伺服电机211输出轴通过第一减速器212与T型连接件26的竖臂连接,第一减速器212外套设有第一座板213,第一座板213与凸起41前端外壁连接,进一步加强与横臂4的连接,通过第一伺服电机211转动经第一减速器212减速后带动T型连接件26水平转动;
[0050]T型连接件26竖臂外套设有轴承箱261,轴承箱261与T型连接件26竖臂之间连接有两个第一滚动轴承262,第一滚动轴承262套设在T型连接件26竖臂两端,轴承箱261与第一座板213连接,轴承箱261与第一滚动轴承262外圈固定连接,T型连接件26与第一滚动轴承262内圈固定连接,限定T型连接件26位置只能发生转动,而位置不发生窜动,T型连接件26的横臂内固定镶嵌有第二伺服电机263,第二伺服电机263的输出轴通过第二减速器264与第一调节臂22连接,通过第二伺服电机263经第二减速器264减速后带动第一调节臂22竖直转动;
[0051]第一调节臂22包括第三伺服电机221、L型接头222第一臂杆223;第二伺服电机263的输出轴通过第二减速器264与L型接头222横臂连接,L型接头222竖臂连接有第一臂杆223,L型接头222竖臂固定内镶嵌有第三伺服电机221,第三伺服电机221输出轴通过第三减速器224与第一臂杆223连接,通过第三伺服电机221转动经第三减速器224减速后带动第一臂杆223自转,第一臂杆223另一端通过关节件23连接第二调节臂24,第一臂杆223带动关节件23和第二调节臂24转动。
[0052]关节件23包括关节套筒231、第四伺服电机232、第二座板233;第一臂杆223与关节套筒231连接,关节套筒231侧壁上固定连接有第二座板233,第二座板233上固定连接有第四伺服电机232,第四伺服电机232的输出轴通过第四减速器与第二调节臂24连接,通过第四伺服电机232经第四减速器减速后带动第二调节臂24竖直转动。
[0053]第二调节臂24包括T型套筒241、第五伺服电机242、第三座板243、第二臂杆244;第四伺服电机232的输出轴通过第四减速器与T型套筒241竖臂连接,T型套筒241横臂内套接有第二臂杆244,T型套筒241横臂与第二臂杆244之间设有第二滚动轴承245,第二滚动轴承245设置在T型套筒241横臂两端内,T型套筒241横臂第一端外连接有第三座板243,第三座板243上连接有第五伺服电机242,第五伺服电机242输出轴通过第五减速器与第二臂杆244一端连接,通过五伺服电机242转动经第五减速器减速后带动第二臂杆244自转,第二臂杆244另一端贯穿T型套筒241横臂与操作装置25连接,第二臂杆244带动操作装置25转动;
[0054]上述限定L型接头222、第一臂杆223、T型套筒241和第二臂杆244的位置只能发生转动,而位置不发生窜动,与限定T型连接件26的方式相同。
[0055]操作装置25包括固定框251、第六伺服电机252、第七伺服电机253、第一锥齿轮254、第二锥齿轮255、腕部箱体256和工作件257;第二臂杆244另一端固定连接有固定框251,固定框251内分别设有横向的第六伺服电机252、第七伺服电机253和竖向的腕部箱体256,第六伺服电机252和第七伺服电机253输出轴方向相反设置,腕部箱体256内设有第一锥齿轮254和第二锥齿轮255,第一锥齿轮254和第二锥齿轮255啮合连接,第一锥齿轮254通过第一齿轮轴2541转动连接的设置在腕部箱体256内,第一齿轮轴2541第一端与第一锥齿轮254连接,第一齿轮轴2541第二端分别贯穿腕部箱体256第一侧壁和固定框251第一侧壁连接有第一带轮2531,第二锥齿轮255通过第二齿轮轴2551转动连接的设置在腕部箱体256内,第二齿轮轴2551另一端贯穿腕部箱体256底壁可拆卸连接有工作件257;腕部箱体256第二侧壁外连接有转动轴2561,转动轴2561贯穿固定框251第二侧壁连接第二带轮2521,第七伺服电机253输出轴贯穿固定框251第一侧壁连接有第三带轮2532,第六伺服电机252输出轴贯穿固定框251第二侧壁连接有第四带轮2522,第三带轮2532和第一带轮2531、第二带轮2521和第四带轮2522外均套设有相配合的皮带,通过第六伺服电机252带动腕部箱体256在竖直方向上的转动,通过第七伺服电机253带动第一锥齿轮254和第二锥齿轮255的运动,锥齿轮机构配合带动了工作件257的转动,工作件257为喷嘴,即喷嘴的转动;
[0056]第一齿轮轴2541分别与腕部箱体256第一侧壁和固定框251第一侧壁之间、第二齿轮轴2551与腕部箱体256底壁之间、转动轴2561与固定框251第二侧壁之间分别设有第三滚动轴承,限定各部件的位置,使得只能发生转动,而不发生窜动;
[0057]上述的各伺服电机均与外接的控制系统通信连接,控制洗车速率和定点洗车。
[0058]本实用新型提供了一种悬挂式双机械臂协作洗车机器人结构,使用时将机架1底部固定连接的弯曲梁42拟采用水泥浇灌固定在地面以下,也可采用有万向轮到所需位置,锁死通过固定基座将其固定,通过第一伺服电机211转动经第一减速器212减速后带动T型连接件26水平转动,T型连接件26带动L型接头222横臂水平转动,用作第一次调节,通过第二伺服电机263经第二减速器264减速后带动L型接头222横臂竖直转动;L型接头222带动第一臂杆223竖直转动,用作第二次调节,通过第三伺服电机221转动经第三减速器224减速后带动第一臂杆223自转,第一臂杆223带动关节件23和第二调节臂24转动,用作第三次调节,通过第四伺服电机232经第四减速器减速后带动T型套筒241竖臂竖直转动,T型套筒241带动第二臂杆244竖直转动,用作第四次调节,通过五伺服电机242转动经第五减速器减速后带动第二臂杆244自转,第二臂杆244带动操作装置25转动,用作第五次转动,通过第七伺服电机253带动第三带轮2532转动,第三带轮2532通过皮带带动第一带轮2531转动,第一带轮2531转动带动第一齿轮轴2541转动,第一齿轮轴2541带动第一锥齿轮254转动,第一锥齿轮254和第二锥齿轮255啮合,第二锥齿轮255带动第二齿轮轴2551转动,从而带动喷嘴的转动,第六次调节;通过第六伺服电机252经类似的带轮和皮带传动,带动转动轴2561转动,转动轴2561带动腕部箱体256做一定范围的转动,进一步调节喷嘴位置,第七次调节,喷嘴与外接出水装置连接;可以通过电脑终端控制伺服电机进行自动控制洗车速率和定点洗车,可以外接移动支付终端,进行终端实时控制、自动控制,选择洗车的时间,自主网络支付洗车。未来可以投放到各大停车场,加油站、服务区,实现共享洗车方式。
[0059]本实用新型的一实施例中,工作件257也可为毛刷或热吹风,将已经洗好的车辆全方位刷干或烘干。
[0060]本实用新型提供了一种悬挂式双机械臂协作洗车机器人结构,由于采用两个悬挂式机器人同时洗车,大大加快了洗车时间;两个悬挂式机器人对称安装在横梁上,节约了安装空间;悬挂式的机械臂洗车机器人方便对车顶及车身进行更好更全面的清洗;洗车机器人清洗时,水枪的水流自上而下喷出,不会造成二次弄脏;
[0061]本实用新型通过其灵活的自由度可以覆盖汽车的全身进行清洗,七次调节即七自由度机器人末端能够在汽车工作空间可以不受约束的覆盖全部车身,同时安装基面足够大,从而保证机器人在工作时的稳定性,作业范围大、动作灵活、能够进行较远处作业也可以进行较近处作业,也可以根据车辆形状进行尺寸的修改,适应各种车型。
[0062]以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。

